Santos - спасибо ! Как всегда - выручаешь !
Вопросы связанные с настройкой.
- Автор темы Monster
- Дата начала
Дополнения к написанному выше (ибо сейчас у тех, у кого есть лямбда и программы для настройки, скачанные из интернета или купленные официально, может возникнуть ещё больше вопросов):
В сети есть статья про настройку холостого хода, где подробно разжёвано, она так и называется - "Настройка холостого хода". там подробно написано как происходит регулировка и как настраивать П-регулирование УОЗ, и ПИ-регулирование РХХ, НО есть нюанс (как говорит Николай)")
Оригинал статьи был написан Андреем (Andy Frost), которого все знают по прошивке TRS и программе Injector Online/
Вот ссылка на оригинал статьи - http://www.injonl.ru/articles/nastr_xx.html ... обратите внимание там на формулу, когда идёт описание ПИ-регулирования:
Здесь всё верно ошибки, нет.
А теперь посмотрите на статью по настройке ХХ на сайте чиптюнер.ру (которая возможно была передрана у Фроста, но при этом они внесли там свои коррективы, выложив формулу с ошибками, какие кочуют из хелпа ещё древнего ЧТП), давать ссылку на статью на чиптюнере (а это делают многие, особенно на форуме чиптюнера, когда особо сами не разобравшись, отправляют новичка учить матчать, давая именно ссылку на статью с сайта в которой есть ошибки). Неправильная статья - http://chiptuner.ru/content/reg_xx/
вот вырезка из статьи с формулой рассчета положения РХХ:
Т.е. статья правильная в исходнике (от Фроста), но не правильная на чиптюнере (несмотря на год размещения 2004, просто Фрост свой сайт INJONL запустил в 2013 году, поэтому на его сайте статья имеет более позднюю дату)
При этом в коде прошивок ВСЕХ, даже адреса пропорционального и интегрального коэффициента и адреса переменных (ошибка оборотов, прошлая ошибка оборотов, текущая ТОЖ и т.д.) особых отличий нет, т.е. (если утрированно) сначала высчитывается EFREQ-EFRET, потом сравниваем текущую ТОЖ, с ТОЖ холодного пуска (и если она меньше, то пропускаем интегральную составляющую регулировки), проверяется на диапазон для интегратора, потом разница ошибок оборотов умножается на значения из памяти по адресу 0x6091 ... Во всех софтах кроме SPT, здесь хранится Интегральный коэффициент, а у Михеенкова, здесь Пропорциональный коэффициент почему-то, и наоборот по адресу 0x6092 у всех - Пропорциональный коэффициент, а у Михеенкова - Интегральный (самое печальное, что эта же ошибка и в описании к сток софту и в картах для редакторов). И так далее по коду ...
В общем к чему это, а к тому, что:
а) Здесь ветка про настройку, и ...
б) Разумно использовать ОПИСАНИЕ из статьи для настройки холостого хода (сам текст) верно для LS, TRS, но не для SPT, потому что для SPT не коррелируются данные в статье, с данными в алгоритме приведенного расчёта.
в) кто понимает, что такое пропорциональное регулирование, и что такое интегральное, при взгляде на формулы - всё станет ясно, и будет понятно, где ошибка ... ну а умники отправляющие настраивать ХХ на статью на чиптюнере - мягко скажем, невнимательны сами, а может и просто не понимают.
Надеюсь, после того, что я написал, кому эта информация поможет.
В сети есть статья про настройку холостого хода, где подробно разжёвано, она так и называется - "Настройка холостого хода". там подробно написано как происходит регулировка и как настраивать П-регулирование УОЗ, и ПИ-регулирование РХХ, НО есть нюанс (как говорит Николай)
Оригинал статьи был написан Андреем (Andy Frost), которого все знают по прошивке TRS и программе Injector Online/
Вот ссылка на оригинал статьи - http://www.injonl.ru/articles/nastr_xx.html ... обратите внимание там на формулу, когда идёт описание ПИ-регулирования:
Итак, работа ПИ-регулятора описывается формулой:
SSM = SSM + TMFR * (KFR * EFREQ + KFRI * (EFREQ - EFRET)), где:
SSM - положение РХХ, шаг.
TMFR - Жесткость регулятора частоты вращения - Коэффициент задающий силу изменения положения РХХ в зависимости от разницы оборотов от заданных.
KFR - Пропорциональный коэффициент РХХ - как и в случае с УОЗ регулированием, определяет отклонение РХХ в зависимости от разницы оборотов. Чем больше разница, тем больше будет смещение РХХ от текущего.
KFRI - Интегральный коэффициент РХХ - Временной коэффициент, изменяет шаги РХХ, в зависимсти от времени непопадания в заданные обороты. Чем дольше по времени обороты не были равны заданным, тем больше будет отклонение РХХ.
EFREQ - Текущая ошибка оборотов при регулировании
EFRET - Ошибка оборотов на предыдущем цикле регулирования
SSM = SSM + TMFR * (KFR * EFREQ + KFRI * (EFREQ - EFRET)), где:
SSM - положение РХХ, шаг.
TMFR - Жесткость регулятора частоты вращения - Коэффициент задающий силу изменения положения РХХ в зависимости от разницы оборотов от заданных.
KFR - Пропорциональный коэффициент РХХ - как и в случае с УОЗ регулированием, определяет отклонение РХХ в зависимости от разницы оборотов. Чем больше разница, тем больше будет смещение РХХ от текущего.
KFRI - Интегральный коэффициент РХХ - Временной коэффициент, изменяет шаги РХХ, в зависимсти от времени непопадания в заданные обороты. Чем дольше по времени обороты не были равны заданным, тем больше будет отклонение РХХ.
EFREQ - Текущая ошибка оборотов при регулировании
EFRET - Ошибка оборотов на предыдущем цикле регулирования
А теперь посмотрите на статью по настройке ХХ на сайте чиптюнер.ру (которая возможно была передрана у Фроста, но при этом они внесли там свои коррективы, выложив формулу с ошибками, какие кочуют из хелпа ещё древнего ЧТП), давать ссылку на статью на чиптюнере (а это делают многие, особенно на форуме чиптюнера, когда особо сами не разобравшись, отправляют новичка учить матчать, давая именно ссылку на статью с сайта в которой есть ошибки). Неправильная статья - http://chiptuner.ru/content/reg_xx/
вот вырезка из статьи с формулой рассчета положения РХХ:
Работа ПИ-регулятора определяется формулой:
SSM = SSM + TMFR * (KFRI * EFREQ + KFR * (EFREQ - EFRET)),
где:
SSM - положение РХХ, шаг.
TMFR - Жесткость регулятора частоты вращения – коэффициент, задающий скорость изменения положения РХХ в зависимости от разницы оборотов от заданных.
KFR - Пропорциональный коэффициент РХХ – как и в случае с УОЗ регулированием, определяет отклонение РХХ в зависимости от разницы оборотов. Чем больше разница, тем больше будет смещение РХХ от текущего.
KFRI - Интегральный коэффициент РХХ – временной коэффициент, изменяет шаги РХХ, в зависимости от времени непопадания в заданные обороты. Чем дольше по времени обороты не были равны заданным, тем больше будет отклонение РХХ.
EFREQ - Текущая ошибка оборотов при регулировании.
EFRET - Ошибка оборотов на предыдущем цикле регулирования.
SSM = SSM + TMFR * (KFRI * EFREQ + KFR * (EFREQ - EFRET)),
где:
SSM - положение РХХ, шаг.
TMFR - Жесткость регулятора частоты вращения – коэффициент, задающий скорость изменения положения РХХ в зависимости от разницы оборотов от заданных.
KFR - Пропорциональный коэффициент РХХ – как и в случае с УОЗ регулированием, определяет отклонение РХХ в зависимости от разницы оборотов. Чем больше разница, тем больше будет смещение РХХ от текущего.
KFRI - Интегральный коэффициент РХХ – временной коэффициент, изменяет шаги РХХ, в зависимости от времени непопадания в заданные обороты. Чем дольше по времени обороты не были равны заданным, тем больше будет отклонение РХХ.
EFREQ - Текущая ошибка оборотов при регулировании.
EFRET - Ошибка оборотов на предыдущем цикле регулирования.
При этом в коде прошивок ВСЕХ, даже адреса пропорционального и интегрального коэффициента и адреса переменных (ошибка оборотов, прошлая ошибка оборотов, текущая ТОЖ и т.д.) особых отличий нет, т.е. (если утрированно) сначала высчитывается EFREQ-EFRET, потом сравниваем текущую ТОЖ, с ТОЖ холодного пуска (и если она меньше, то пропускаем интегральную составляющую регулировки), проверяется на диапазон для интегратора, потом разница ошибок оборотов умножается на значения из памяти по адресу 0x6091 ... Во всех софтах кроме SPT, здесь хранится Интегральный коэффициент, а у Михеенкова, здесь Пропорциональный коэффициент почему-то, и наоборот по адресу 0x6092 у всех - Пропорциональный коэффициент, а у Михеенкова - Интегральный (самое печальное, что эта же ошибка и в описании к сток софту и в картах для редакторов). И так далее по коду ...
В общем к чему это, а к тому, что:
а) Здесь ветка про настройку, и ...
б) Разумно использовать ОПИСАНИЕ из статьи для настройки холостого хода (сам текст) верно для LS, TRS, но не для SPT, потому что для SPT не коррелируются данные в статье, с данными в алгоритме приведенного расчёта.
в) кто понимает, что такое пропорциональное регулирование, и что такое интегральное, при взгляде на формулы - всё станет ясно, и будет понятно, где ошибка ... ну а умники отправляющие настраивать ХХ на статью на чиптюнере - мягко скажем, невнимательны сами, а может и просто не понимают.
Надеюсь, после того, что я написал, кому эта информация поможет.
Все эти статьи о настройке ХХ не стоят и выеденного яйца. Как и тот факт перепутаны там коэффициенты или нет.
Есть вещи которые оказывают влияние но нигде не описаны - в итоге методом тыка и методом "ничего там не трогай и покорми собак" получается настроить ХХ значительно лучше чем по любым писанинам из инета..
Есть вещи которые оказывают влияние но нигде не описаны - в итоге методом тыка и методом "ничего там не трогай и покорми собак" получается настроить ХХ значительно лучше чем по любым писанинам из инета..
Maxi,
Максим, но новичкам же надо от чего-то отталкиваться, хотя в большинстве случаев вся настройка в таком случае заключается в - кручу всё.
Новичкам конечно же проще, когда кто-то разжевал - КАК, или сделал автоматизацию на уровне - САМА ВСЁ НАСТРОИТ ... но это есть не только лишь у всех
SSM = SSM(n-1) + ((EFREQ-EFREQ(n-1))*KP*TMFR)*0.15625
SSM = SSM(n-1) + (EFREQ*KI*TMFR)*0.15625
Максим, но новичкам же надо от чего-то отталкиваться, хотя в большинстве случаев вся настройка в таком случае заключается в - кручу всё.
Новичкам конечно же проще, когда кто-то разжевал - КАК, или сделал автоматизацию на уровне - САМА ВСЁ НАСТРОИТ ... но это есть не только лишь у всех
SSM
= SSM(n-1) + ((EFREQ-EFREQ(n-1))*KP*TMFR)*0.15625SSM
= SSM(n-1) + (EFREQ*KI*TMFR)*0.15625а это что?
KFR * (EFREQ - EFRET))
EFREQ - Текущая ошибка оборотов при регулировании.
EFRET - Ошибка оборотов на предыдущем цикле регулирования.
да и вообще вся эта формула и есть интегратор грубо говоря.
чем больше разница между двумя циклами регулирования тем больше воздействие в следующем цикле.
из позапрошлых циклов она тоже набирает ошибку через вот эту переменную
EFRET.
временная составляющая постоянна и определяется тактами какогото там программного таймера, явно он тут не указан
KFR * (EFREQ - EFRET))
EFREQ - Текущая ошибка оборотов при регулировании.
EFRET - Ошибка оборотов на предыдущем цикле регулирования.
да и вообще вся эта формула и есть интегратор грубо говоря.
чем больше разница между двумя циклами регулирования тем больше воздействие в следующем цикле.
из позапрошлых циклов она тоже набирает ошибку через вот эту переменную
EFRET.
временная составляющая постоянна и определяется тактами какогото там программного таймера, явно он тут не указан
Последнее редактирование:

Откуда эти формулы?) И что за множитель 0,15625?
Регулируемый режим – холостой ход.
Режим характерен присутствием флага ХХ и закрытым дросселем.
В этом режиме обороты ХХ стабилизируются 2-мя регуляторами.
1) П-регулятором УОЗ.
2) ПИ-регулятором положения РХХ.
В этом режиме не используется уставка РХХ!, начальное положение РХХ рассчитывается адаптивно.
Также в этом режиме производится компенсация рассогласования реального положения РХХ и программного положения РХХ (FSM) – этот алгоритм называется адаптацией положения РХХ по расходу воздуха и подробно описан ниже.
Фактически вы не можете влиять на положение РХХ в этом режиме, вам надо всего лишь добиться, чтоб при переходе в регулируемый режим (после пуска или при сбросе газа) положение РХХ оказалось как можно ближе к положению определяемому регулятором, иначе возможно перерегулирование, что приведет к тому что двигатель заглохнет.
Управление углом опережения зажигания на холостом ходу (регулируемый режим).
Управление УОЗ в режиме ХХ производится с помощью асимметричного пропорционального регулятора УОЗ. В каждом цикле управления производится вычисление отклонения оборотов ХХ от желаемых – которое мы будем называть ошибкой оборотов (Efreq). Если ошибка меньше чем “Холостой ход/П регулятор уоз/Зона нечувствительности” – какого либо влияния на УОЗ не производится. Если ошибка больше – она умножается на пропорциональный коэффициент (их 2 - для низких и высоких оборотов, поэтому регулятор асимметричен и его влияние может иметь разный вес в случае отклонений оборотов в разные стороны). Полученное значение угла ограничивается минимальным смещением УОЗ (если обороты высокие) и максимальным смещением УОЗ (если обороты низкие). Угол добавляется к “УОЗ на холостом ходу”. Регулятор УОЗ обладает высоким быстродействием (1/20c) и не имеет памяти состояний, что позволяет ему очень быстро реагировать на изменение условий работы двигателя.
Управление положением РХХ на холостом ходу (регулируемый режим)
Управление положением шагового мотора в регулируемом режиме производится с помощью 2-х регуляторов, асимметричного дифференциального и пропорционально-интегрального.
Пропорционально Интегральный регулятор.
Этот регулятор используется для стабилизации оборотов холостого хода на заданном значении.
Формула регулятора:
SSM = SSM(n-1) + ((EFREQ-EFREQ(n-1))*KP*TMFR)*0.15625
SSM = SSM(n-1) + (EFREQ*KI*TMFR)*0.15625
Где SSM – положение РХХ.
SSM(n-1)- положение РХХ в прошлом цикле.
EFREQ– ошибка оборотов в текущем цикле ограниченная значением “Ограничение ошибки интегратора”.
KI KP – коэффициенты регулятора.
TMFR – Жесткость регулятора частоты вращения.
Режим характерен присутствием флага ХХ и закрытым дросселем.
В этом режиме обороты ХХ стабилизируются 2-мя регуляторами.
1) П-регулятором УОЗ.
2) ПИ-регулятором положения РХХ.
В этом режиме не используется уставка РХХ!, начальное положение РХХ рассчитывается адаптивно.
Также в этом режиме производится компенсация рассогласования реального положения РХХ и программного положения РХХ (FSM) – этот алгоритм называется адаптацией положения РХХ по расходу воздуха и подробно описан ниже.
Фактически вы не можете влиять на положение РХХ в этом режиме, вам надо всего лишь добиться, чтоб при переходе в регулируемый режим (после пуска или при сбросе газа) положение РХХ оказалось как можно ближе к положению определяемому регулятором, иначе возможно перерегулирование, что приведет к тому что двигатель заглохнет.
Управление углом опережения зажигания на холостом ходу (регулируемый режим).
Управление УОЗ в режиме ХХ производится с помощью асимметричного пропорционального регулятора УОЗ. В каждом цикле управления производится вычисление отклонения оборотов ХХ от желаемых – которое мы будем называть ошибкой оборотов (Efreq). Если ошибка меньше чем “Холостой ход/П регулятор уоз/Зона нечувствительности” – какого либо влияния на УОЗ не производится. Если ошибка больше – она умножается на пропорциональный коэффициент (их 2 - для низких и высоких оборотов, поэтому регулятор асимметричен и его влияние может иметь разный вес в случае отклонений оборотов в разные стороны). Полученное значение угла ограничивается минимальным смещением УОЗ (если обороты высокие) и максимальным смещением УОЗ (если обороты низкие). Угол добавляется к “УОЗ на холостом ходу”. Регулятор УОЗ обладает высоким быстродействием (1/20c) и не имеет памяти состояний, что позволяет ему очень быстро реагировать на изменение условий работы двигателя.
Управление положением РХХ на холостом ходу (регулируемый режим)
Управление положением шагового мотора в регулируемом режиме производится с помощью 2-х регуляторов, асимметричного дифференциального и пропорционально-интегрального.
Пропорционально Интегральный регулятор.
Этот регулятор используется для стабилизации оборотов холостого хода на заданном значении.
Формула регулятора:
SSM
= SSM(n-1) + ((EFREQ-EFREQ(n-1))*KP*TMFR)*0.15625SSM
= SSM(n-1) + (EFREQ*KI*TMFR)*0.15625Где SSM
– положение РХХ.SSM(n-1)- положение РХХ в прошлом цикле.
EFREQ
– ошибка оборотов в текущем цикле ограниченная значением “Ограничение ошибки интегратора”.KI KP – коэффициенты регулятора.
TMFR – Жесткость регулятора частоты вращения.
Искать не умеешь. Это аналог бош 039. Я такими же торгую.
Ладно патенты, они не скрываются. Можно много интересного но расплывчатого посмотреть.
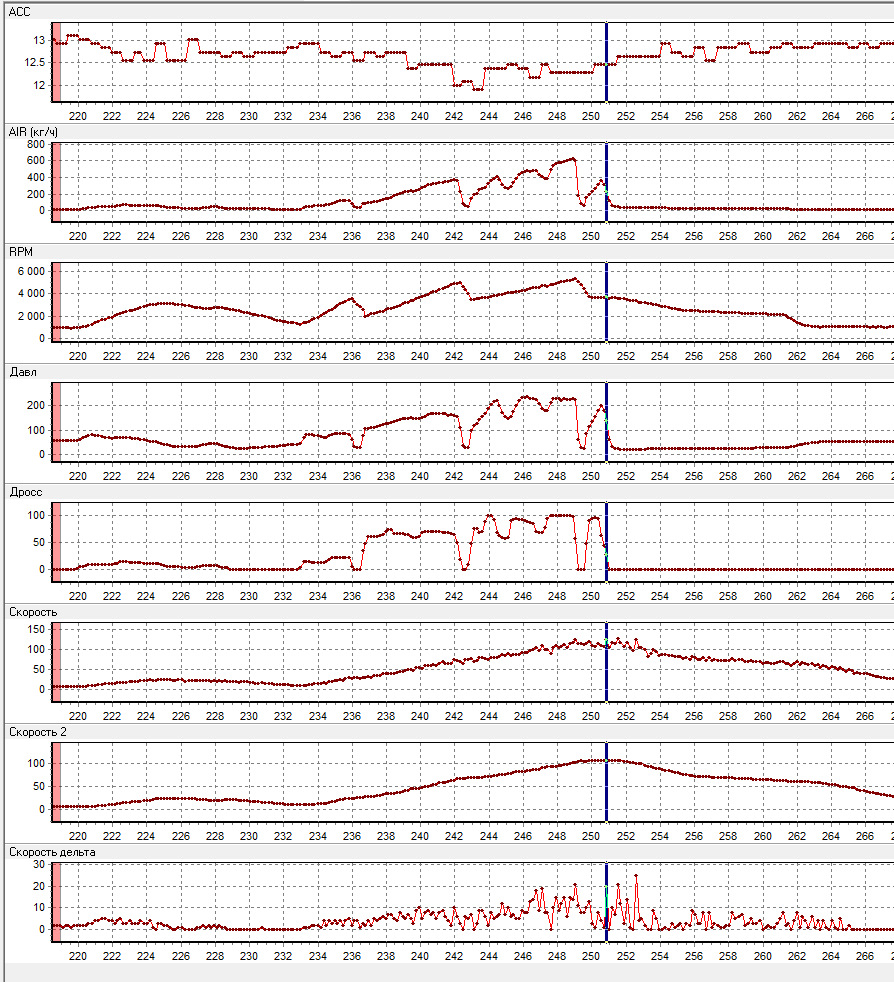
Тут выяснилось что показания по первому датчику скорости, который в кпп есть прыжки, на высокой скорости показания пляшут +/- 15-20 км/ч, но только в логе видно, по приборке и бортовику скачков нет. Напруга пляшет, но дело не в ней, тестил с несколько заходов, в первые просадки не было.
Как бы вылечить? Мнения разделились, ктото говорит дс бесконтактный приора внедрить надо, кто что просто дс сменить или привод (дс обычный 2110 сейчас)

Тут выяснилось что показания по первому датчику скорости, который в кпп есть прыжки, на высокой скорости показания пляшут +/- 15-20 км/ч, но только в логе видно, по приборке и бортовику скачков нет. Напруга пляшет, но дело не в ней, тестил с несколько заходов, в первые просадки не было. Как бы вылечить? Мнения разделились, ктото говорит дс бесконтактный приора внедрить надо, кто что просто дс сменить или привод