Шишконабиватель v.2. Продвинутый, полуавтоматический
- Автор темы fignja
- Дата начала
Сейчас смотрю как они грм на bud меняют. Стало не понятно зачем они ключом специальным шкив держат. Почему нельзя пятую воткнуть и тормоз зажать?
а про егаз что мешает его выкинуть?
Я понимаю и орис тому хороший пример. 1,4 атмо для октавии дохловатый по разгону оказался. Хотя я пока грм не сменю стараюсь сильно не крутить. От чего хотел убежать на жигулях 3000 об/мин на 90 км/ч к тому же и вернулся похоже. Хотя заметно тише. Едет она нереально прямо после жигулей. Тормоза даже неисправные на порядок лучше. Хотя как по мне педаль тормоза чересчур мягкая.
Просто из меня настройщик кривоватый. На жигуле у меня вечно в каких-то режимах переходных дерготня была...
Просто из меня настройщик кривоватый. На жигуле у меня вечно в каких-то режимах переходных дерготня была...
Педаль тормоза мягкая , да . Сцепления тоже . Газа тоже . Привыкай , машина не для того чтобы с ней бороться , а чтобы наслаждаться
")
чтобы одному без помощи кого либо открутить,а так тогда надо 2го человека, кстати у тебя этот шкив скорее всего прикручен 4мя болтами к шкиву грм, и тогда болт колена откручивать не надо.
а про егаз что мешает его выкинуть?
а про егаз что мешает его выкинуть?
Ну как сказать. Мне по сути нравится как себя ведет мотор по настройке, хотя может и чуть тупо откликается. Я сторонник сохранения родных систем, если есть такая возможность.
Прочитал штук десять книжек по машинному обучению и немного осознал вершину айсберга высокоуровневого языка программирования Python. Лет 25 назад эталоном языка программирования среди ученых был фортран и ходила шутка, что любая решенная задача уже есть в его библиотеках.

Сейчас это питон и его парадигма ООП, которая ранее была мне совершенно не понятна и сейчас нифига не понятна, но идеально соответствует подходам к разработке моделей машинного обучения. При этом в нем как раз отданная команда роботу чистить картошку вполне будет работоспособна – кто-то уже написал class Potatos: и функцию:
«картошка.чистить(картофелина, размер = ‘круглая’, нож = ‘токарный станок’, оператор = ’не трезв’, batch_size=10)».
Только для этого придется скачать десяток гигов библиотек правильных версий которые должны совпасть между собой, виндой, дровами и т.д (актуально для обучения на видеокартах нвидиа и керас). А еще оно сильно жрет оперативку и иногда не отдает обратно занятую область памяти полностью. Какой-то мужик затронул эту тему на конференции и ему на серьезных щщах посоветовали докупить пару плашек оперативки)))).
Первый этап в разработке моего сраного адаптивного круиза – это распознавание дороги, разметки и машин на видео с камеры. Результаты текущего состояния можете увидеть на видео внизу. Весь объем кода, чтобы это осуществить занял где-то 200-300 строк кода. Если не вдаваться в детали, то вся суть машинного обучения это создать офигенно нелинейную математическую функцию с нужным количеством входных аргументов и осей x,x2….,y,y2,y3, которая выдает на выходе нужный нам ответ z1,z2,z3. Обучающие данные xxxyyy с известным ответом zzz позволяют определить нужные коэффициенты, чтобы это работало. Собственно такие обучающие данные были выложены в открытом доступе проектом commai.
Под это дело была обучена ранее известная по структуре сеть unet для сегментации изображений. Пока важен был скорее сам факт, что сеть обучается и что-то сегментирует. Дальше можно будет за счет выбора гиперпараметров (скорости обучения и формы сети), а также аугментации исходных данных (наклон, смещение, отражение, обрезка, деформация изображений) дополнительно повысить точность прогноза. Отваливается все это обучение регулярно. То памяти лишней отожрет, то комп заснет и конфликт какой-нить.
Отдельно отмечу что этим моделям пофигу на чем обучатся. Я в одном месте перепутал оси. Керас это сожрал спокойно. В результате картинка уплыла по смещению.
000000
111111
222222
333333
0000
0011
1111
2222
2233
3333
Модели было абсолютно пофигу и она это обобщила. Хотя внешне для человека на выходе была чушь полнейшая.
А собственно вот как это чудо пытается работать сейчас на примере видео с авто регистратора. Справа сегментированное изображение. Далее по разметке вполне реально определить траекторию движения и когда нужно отпустить газ круиза. Есть еще над чем работать, но все решаемо...
Unet for selfdrive car low resolution video segmentation - YouTube
Сейчас это питон и его парадигма ООП, которая ранее была мне совершенно не понятна и сейчас нифига не понятна, но идеально соответствует подходам к разработке моделей машинного обучения. При этом в нем как раз отданная команда роботу чистить картошку вполне будет работоспособна – кто-то уже написал class Potatos: и функцию:
«картошка.чистить(картофелина, размер = ‘круглая’, нож = ‘токарный станок’, оператор = ’не трезв’, batch_size=10)».
Только для этого придется скачать десяток гигов библиотек правильных версий которые должны совпасть между собой, виндой, дровами и т.д (актуально для обучения на видеокартах нвидиа и керас). А еще оно сильно жрет оперативку и иногда не отдает обратно занятую область памяти полностью. Какой-то мужик затронул эту тему на конференции и ему на серьезных щщах посоветовали докупить пару плашек оперативки)))).
Первый этап в разработке моего сраного адаптивного круиза – это распознавание дороги, разметки и машин на видео с камеры. Результаты текущего состояния можете увидеть на видео внизу. Весь объем кода, чтобы это осуществить занял где-то 200-300 строк кода. Если не вдаваться в детали, то вся суть машинного обучения это создать офигенно нелинейную математическую функцию с нужным количеством входных аргументов и осей x,x2….,y,y2,y3, которая выдает на выходе нужный нам ответ z1,z2,z3. Обучающие данные xxxyyy с известным ответом zzz позволяют определить нужные коэффициенты, чтобы это работало. Собственно такие обучающие данные были выложены в открытом доступе проектом commai.
Под это дело была обучена ранее известная по структуре сеть unet для сегментации изображений. Пока важен был скорее сам факт, что сеть обучается и что-то сегментирует. Дальше можно будет за счет выбора гиперпараметров (скорости обучения и формы сети), а также аугментации исходных данных (наклон, смещение, отражение, обрезка, деформация изображений) дополнительно повысить точность прогноза. Отваливается все это обучение регулярно. То памяти лишней отожрет, то комп заснет и конфликт какой-нить.
Отдельно отмечу что этим моделям пофигу на чем обучатся. Я в одном месте перепутал оси. Керас это сожрал спокойно. В результате картинка уплыла по смещению.
000000
111111
222222
333333
0000
0011
1111
2222
2233
3333
Модели было абсолютно пофигу и она это обобщила. Хотя внешне для человека на выходе была чушь полнейшая.
А собственно вот как это чудо пытается работать сейчас на примере видео с авто регистратора. Справа сегментированное изображение. Далее по разметке вполне реально определить траекторию движения и когда нужно отпустить газ круиза. Есть еще над чем работать, но все решаемо...
Unet for selfdrive car low resolution video segmentation - YouTube
В общем за полгода ковыряния кераса получилось дойти в точности определения пикселей по категориям дорога/разметка/машины/неездабельно до 0.985, что в принципе весьма нормальный результат. Но есть еще что ковырять. Постараюсь в течение ближайшего месяца уже остановится на какой-то одной архитектуре модели нейронной сети и потихоньку пытаться запустить ее не имеющемся железе. Заодно выложу сюда пару видео с регистратора.
Выдрал у себя из центральной консоли магнитолу, которая держалась на пеноплексе и начал потихоньку делать ей замену.
В основе системы как и планировал джетсон нано. Заказал с алика и она уже пришла всего за 10 к рублей.
Внезапно у нвидии даже есть промышленная версия, которую можно и в авто, и в мед устройства, но это не мой случай.
Еще заказал себе с алика 3д принтер и кучу разной электроники для сборки своей хреновины. Буду потихоньку это освящать.
Хочется сделать качественный продуманный корпус...
Китайцы не доложили деталей, пришлось заказывать отдельно валы и ремни для принтера....
На данный момент определяюсь с размером дышла приборной панели, чтобы туда запихивать все это дело.



Выдрал у себя из центральной консоли магнитолу, которая держалась на пеноплексе и начал потихоньку делать ей замену.
В основе системы как и планировал джетсон нано. Заказал с алика и она уже пришла всего за 10 к рублей.
Внезапно у нвидии даже есть промышленная версия, которую можно и в авто, и в мед устройства, но это не мой случай.
Еще заказал себе с алика 3д принтер и кучу разной электроники для сборки своей хреновины. Буду потихоньку это освящать.
Хочется сделать качественный продуманный корпус...
Китайцы не доложили деталей, пришлось заказывать отдельно валы и ремни для принтера....
На данный момент определяюсь с размером дышла приборной панели, чтобы туда запихивать все это дело.

смотри чтоб на ходу все не рыгнуло
Сначала соберу эту систему в корпусе и протестирую на столе в паре автосимуляторов.
Сама по себе она будет на ядре убунту.
Отображение экрана через openGL без старта иксов.
Когда магнитолу выламывал обрадовался наличию кана. Потом выяснил что это шина комфорта и она мне мало что дает.
Теперь думаю как лучше. Толи разбирать протоколы ВАСИ и подключаться к гейту (кан-порту) по диагностике, толи подключиться к приборке и пытаться потихоньку реверсинженерить каншину.
Склоняюсь ко второму варианту.
Вот этот разъем суицидника все еще в пути.

Как по вашему вот такое реле для защитной системы "красной кнопки" и исключения всей моей мути от педали газа пойдет
https://www.chipdip.ru/product/3-1393789-7-v23079a2003b301 ?
Т.е. условно армка читает положение педали газа реальное. Выставляет такое же значение напряжения на двух своих выходах по pwm. и потом с отдельного тумблера включается вот это реле, переключая эбу с педали на выходы pwm arm.

Объявляется день дымовухи. Начал собирать эту хрень. Первый раз оказался плохим провод питания джетсона, заменил на нормальный. Ошибка плохого питания пропала.
Запитано это все от компьютерного бп. По запарке общий плюс для pwm микроконтроллера яркости экрана и платы GPS повесил на +12 вольт.
Контроллер так нагрелся, что выпаялся из схемы.
Рад что не спалил экран. С GPS модулем надеюсь ограничусь заменой стабилитрона.
Не было мультиметра, в понедельник будет ясно.
Запитано это все от компьютерного бп. По запарке общий плюс для pwm микроконтроллера яркости экрана и платы GPS повесил на +12 вольт.
Контроллер так нагрелся, что выпаялся из схемы.
Рад что не спалил экран. С GPS модулем надеюсь ограничусь заменой стабилитрона.
Не было мультиметра, в понедельник будет ясно.
Вложения
-
 2.2 MB Просмотры: 0
2.2 MB Просмотры: 0
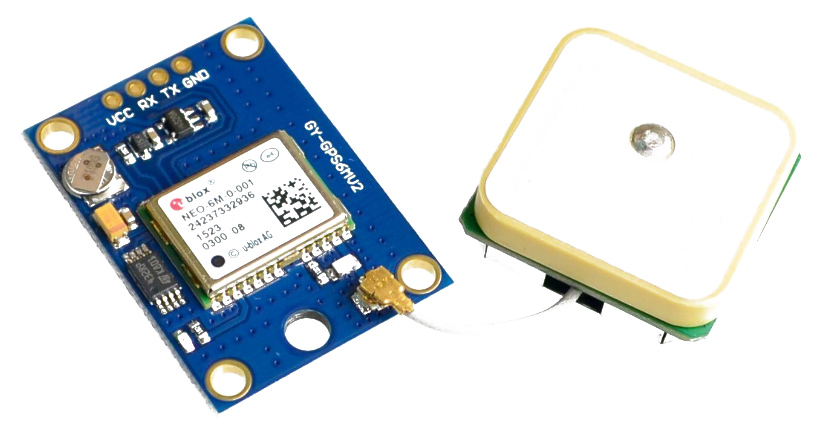
Было подано 12 вольт вместо 5 на вход модуля neo6m
Стабилизатор там стоит 4b2k как я понимаю шоттки там тоже есть sj
Тут маркировки чуть другие, но схема та же. Потеря не велика, но если получиться починить, то почему бы и нет.
Горело хорошо с дымком, но не обратил внимания откуда...
Второй микроконтроллер диджиспарк нагрелся так, что с него выпаялся сам чип аттини 85. Собственно видно на фото слева внизу. Этот вообще недорогой, жалко, но фиг с ним.
Стабилизатор там стоит 4b2k как я понимаю шоттки там тоже есть sj
Тут маркировки чуть другие, но схема та же. Потеря не велика, но если получиться починить, то почему бы и нет.
Горело хорошо с дымком, но не обратил внимания откуда...
Второй микроконтроллер диджиспарк нагрелся так, что с него выпаялся сам чип аттини 85. Собственно видно на фото слева внизу. Этот вообще недорогой, жалко, но фиг с ним.

